Autonomní systémy
Robert Mařík
2020
Pokud se matematické výrazy nezobrazují korektně, nechejte znovunačíst stránku (Reload, Crtl+R, F5) nebo použijte html verzi prezentace.
Ovládání: Prezentaci je možno posouvat šipkami nebo mezerníkem. Klávesa "S" zmenšuje písmo, "B" zvětšuje (smaller/bigger). Klávesa "C" zobrazí obsah (content). Klávesou "A" se přepíná režim prezentace/html stránka.
Kliknutím na obrázek se obrázek zvětší na vertikální rozměr okna. Pro zavření zvětšeniny klikněte do zašedlého zbytku stránky nebo použijte klávesu "ESC".
Slidy jsou doprovodným materiálem k předáškám. Některá tvrzení platí
pouze za předpokladů dostatečné spojitosti funkcí nebo jejich
derivací. V jednoduchých technických aplikacích bývají tyto
předpoklady splněny a proto je nezmiňujeme. Přesná formulace vět je
v učebním textu a v odborné literatuře.
Opakování
- Maticový součin
- Řešitelnost homogenní soustavy lineárních rovnic
- Vlastní hodnoty a vlastní vektory
- Řešitelnost kvadratických funkcí v komplexním oboru
- Eulerova identita
- Chování exponenciální funkce \(e^{kt}\) v nekonečnu
Úmluva
V celé přednášce budeme jako nezávislou proměnnou uvažovat čas \(t\). Autonomní znamená v tomto kontextu nezávislý na čase. Budeme studovat rovnice mající tuto vlastnost. Budeme dále studovat systémy, které mají dostatečně pěkná data na to, aby byla zaručena jednoznačnost řešení. To je například, pokud funkce na pravé straně rovnice má ohraničené parciální derivace, což bude v níže uvedených příkladech vždy splněno.
Autonomní systém v jedné dimenzi
Rovnice \[\frac{\mathrm dy}{\mathrm dt}=f(y)\tag{1}\] je autonomní systém v jedné dimenzi. Je speciálním případem rovnice se separovanými proměnnými a umíme ji řešit analytickou cestou. Proto se nyní nebudeme zaměřovat na hledání obecného řešení, ale pokusíme se popsat chování řešení, aniž bychom tato řešení znali. Pokusíme se s co nejmenší námahou říct, jak se budou řešení chovat.
Všechna konstantní řešení rovnice (1) jsou nulové body pravé strany. Nazývají se stacionární body. Je užitečné umět posoudit chování řešení v okolí stacionárních bodů, což umožní následující věta.
Věta (stabilita konstantních řešení).
Jestliže platí \(f(y_0)=0\), je konstantní funkce \(y(x)=y_0\) konstantním řešením rovnice \[\frac{\mathrm dy}{\mathrm dt}=f(y).\] Toto řešení je stabilní pokud \(f'(y_0)<0\) a nestabilní pokud \(f'(y_0)>0\).
Poznámka (stabilita řešení).
Stabilita je u diferenciálních rovnic chápána různým způsobem. V tomto textu stabilitou stacionárního bodu budeme rozumět, že malá výchylka od stacionárního bodu vede na řešení, které konverguje zpět k tomuto stacionárnímu bodu. Přesněji se tento typ stability jmenuje asymptotická stabilita.
Pro grafickou interpretaci věty je vhodné připomenout, že funkce s kladnou derivací jsou rostoucí a funkce se zápornou derivací klesající. Pokud má tedy pravá strana derivaci různou od nuly, poznáme stabilitu z monotonie pravé strany.
Věta je odvozena z pozorování, že rovnice \(y'=ky\) má řešení \(y(t)=Ce^{kt}\) a toto řešení se pro velká \(t\) blíží k nule nebo roste neohraničeně, v závislosti na znaménku hodnoty \(k\). Pravou stranu rovnice, funkci \(f(y)\), je možné aproximovat vztahem \(f(y)\approx f'(y_0)(y-y_0)\) a odsud a z poznatku, že malá změna rovnice vetšinou nemění dramaticky chování řešení (přesněji, existuje spojitá závislost na parametrech) a proto rovnice \(y'=f(y)\) kopíruje v okolí bodu \(y_0\) chování rovnice \((y-y_0)'=f'(y_0)(y-y_0)\), pokud vynecháme patologické případy, což je zde \(f'(y_0)=0\). Řešení je tedy \(y\approx y_0+Ce^{f'(y_0)t}\) a tato funkce buď konverguje k \(y_0\) nebo roste neohraničeně, v závislosti na znaménku derivace \(f'(y_0)\).
Model soupeření jestřábí a holubičí povahy
Cílem tohoto modelu je studovat typy chování živočichů a rostlin a zjistit, zda některý typ chování přináší jeho nositelům evoluční výhodu.
Nechť se v populaci vyskytují dva vzorce chování – jedince používající první z nich budeme nazývat jestřábi a druhý holubice. Chování se projeví, pokud se dva jedinci setkají u téhož zdroje (potrava, hnízdiště, apod).
- Jestřáb o zdroj bojuje a ustoupí pouze po prohraném boji.
- Holubice o zdroje nebojuje a zkonzumuje zdroj pouze pokud protivník ustoupí bez boje.
- Předpokládejme, že každý jedinec v populaci si zkonzumování zdroje si může svou evoluční zdatnost posílit o hodnotu \(V\), pokud je nucen a ochoten o zdroj bojovat, je jeho evoluční zdatnost naopak snížena o hodnotu \(D\).
- Setkají-li se u zdroje dvě holubice, jedna z nich ustoupí bez boje a druhá zkonzumuje zdroj. Předpokládejme, že po častých setkáních tohoto typu každá holubice zkonzumuje průměrně polovinu zdrojů.
- Setká-li se u zdroje holubice s jestřábem, zkonzumuje celý zdroj jestřáb.
- Setkají-li se u zdroje dva jestřábi, ani jeden z nich neustoupí a bojují o zdroj. Předpokládejme, že všichni jestřábi jsou stejně silní a po boji je pravděpodobnost zkonzumování zdroje poloviční pro každého jestřába.
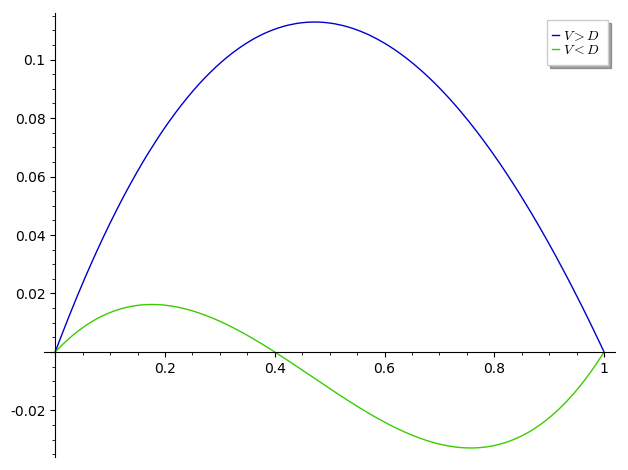
Matematický rozbor (J. Kalas, Z. Pospíšil, Spojité modely v biologii) ukazuje, že četnost \(x\) výskytu jestřábů v populaci řídí diferenciální rovnicí \[x'=x(1-x)\left(\frac V2-\frac D2 x\right).\] Jediné realistické hodnoty \(x\) jsou z intervalu \([0,1]\). Pro nalezení stacionárních bodů a posouzení jejich stability budeme studovat funkci \[f=x(1-x)\left(\frac V2-\frac D2 x\right).\] Stacionární body rovnice jsou nulové body funkce \(f\) a to jsou \(x=0\), \(x=1\) a \(x=\frac VD\). Poslední stacionární bod v závislosti na hodnotě paraemtrů může a nemusí ležet v intervalu \([0,1]\)
- V bodě \(x=0\) funkce \(f\) nulová a rostoucí. Stacionární bod \(x=0\) je vždy nestabilní. Ať jsou tedy podmínky jakékoliv, vždy budou v populaci přítomni jestřábi. Přitom právě jestřábi paradoxně plýtvají zdroji energie na boj, namísto, aby celou energii zaměřili na rozmnožování. Z hlediska efektivity při využívání zdrojů prostředí platí, že populace složená ze samých holubic využívá zdroje prostředí nejefektivnějším možným způsobem. Přesto je taková populace evolučně nestabilní! Pronikne-li do populace samých holubic jeden jestřáb, má značnou evoluční výhodu, protože každý zdroj, u kterého se nachází, zkonzumuje. Tím poroste jeho evoluční zdatnost a jeho geny nebo vzorce chování (u druhů které mohou přepínat strategie chování) se budou v populaci rychle šířit.
- Pokud jsou náklady na boj větší než užitek ze zdrojů, platí \(V<D\). V intervalu \([0,1]\) leží stacionární bod \(x=\frac VD\) a tento bod je stabilní. Poslední stacionární bod \(x=1\) je nestabilní. V tomto případě všechna řešení konvergují ke stacionárnímu bodu \(x=\frac VD\). V populaci tedy budou přítomni i jestřábi i holubice.
- Pokud platí \(V>D\), všechna řešení konvergují ke stacionárnímu bodu \(x=1\). Ať je počáteční rozložení vzorců chování v populaci jakékoliv, evolučně stabilní je pouze populace složená ze samých jestřábů. Jsou-li náklady na boj o zdroje nižší než užitek ze zdrojů, nevyplatí se ustupovat při soupeření o zdroje. Příkladem populace složené ze samých jestřábů je les. Náklady na boj spočívají ve vytvoření vyššího kmene, užitkem je světlo.
Logistická diferenciální rovnice s konstantním lovem
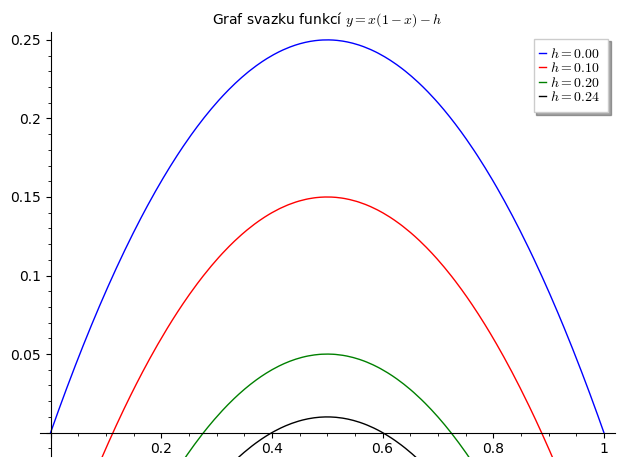
Logistická diferenciální rovnice s konstantním lovem \(h\), tj. rovnice \[\frac{\mathrm dy}{\mathrm dt}=ry\left(1-\frac yK\right)-h,\] má pro malé \(h\) dva stacionární body. Funkce \(ry\left(1-\frac yK\right)\) je parabola otočená vrcholem nahoru a s nulovými body \(y=0\) a \(y=K\). V prvním stacionárním bodě je funkce rostoucí a tento stacionární bod je nestabilní. Ve druhém stacionárním bodě je funkce klesající a tento stacionární bod je stabilní. Jak se zvyšuje faktor \(h\), graf paraboly se posouvá směrem dolů a oba stacionární body se posouvají směrem k sobě a k vrcholu. Jejich stabilita zůstává neporušena. To znamená, že sice pořád existuje stabilní stav, ale se zvyšující se intenzitou lovu se tento stacionární stav dostává stále blíže ke stavu nestacionárnímu a rovnováha je tedy poněkud křehká.
Nakreslit online
Pokud se intenzita lov zvětšuje tak, že se parabola dostane vrcholem na vodorovnou osu a poté pod tuto osu, oba stacionární body splynou v jeden a zaniknou. V okamžiku, kdy se vrchol dostává pod vodorovnou osu i malinká změna v lovu způsobí dramatickou změnu v modelu. Ztratí se totiž existence stabilního řešení a všechna řešení budou konvergovat k nule.
Poznámka (strukturální stabilita modelu, bifurkace).
Stabilita je u diferenciálních rovnic chápána různým způsobem. V tomto textu budeme strukturální stabilitou modelu závislého na parametrech rozumět stav, kdy malá změna parametrů nemění kvalitativní vlastnosti systému, tj. například zůstává stejný počet stacionárních bodů, zachovává se jejich stabilita. To je očekávatlené chování, malá změna modelu zplsobí malé změny v řešení. Pro některé hodnoty parametrů však strukturální stabilitu ztrácíme. V takovém případě se i při nepatrných změnách parametrů dramaticky mění chování systému. Například při zvyšování lovu v právě uvažovaném modelu dva stacionární body splynou v jeden a zaniknou. Takové chování se nazývá bifurkace a hodnoty parametrů, při kterých k bifurkaci dojde, jsou důležité pro další vývoj předmětu. Zjednodušeně řečeno, malé změny parametrů v oblasti daleko od bifurkace znamenají, že chování modelu se mění pozvolna. Blízko k bifurkační hodnotě je situace komplikovanější a může se stát, že malá změna parametrů modelu způsobí dramaticky odlišné chování modelu. Systém blízký bifurkaci je citlivý na rozkolísání.
Autonomní rovnice s pravou stranou ve tvaru rozdílu
Poznámka (autonomní rovnice s rozdílem na pravé straně).
Rovnice \[\frac{\mathrm dy}{\mathrm dt}=g(y)-h(y)\] má stacionární bod \(y_0\), jestliže \[g(y_0)=h(y_0).\] Často jsou funkce \(g\) a \(h\) zadány graficky a stacionární bod je v průsečíku grafů funkcí \(g\) a \(h\). Ze vzájemné polohy těchto grafů také vidíme, zda je stacionární bod stabilní (funkce \(g\) je napravo od bodu \(y_0\) pod funkcí \(h\) a nalevo nad ní) nebo nestabilní (naopak).
Teplotní bilance Země
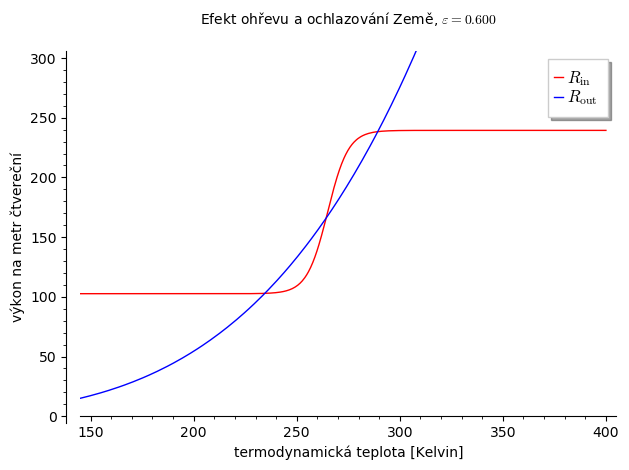
Příklad. Teplotní bilanci Země je možno vyjádřit rovnicí \[\frac{\mathrm dT}{\mathrm dt}=R_{\text{in}}(T)-R_{\text{out}}(T),\] kde \(R_{\text{in}}\) a \(R_{\text{out}}\) jsou funkce dané na obrázku. Vidíme tři průsečíky, tj. tři stacionární body. Uvažujme stacionární bod nejvíce napravo. Malá výchylka nahoru k větší teplotě nás posune do oblasti, kde převažuje vyzařování energie, \(R_{\text{out}}\) je vetší než \(R_{\text{in}}\), pravá strana je záporná a teplota klesá zpět do stacionárního stavu. Podobně, malá výchylka směrem dolů způsobí nárůst a opět návrat do stacionárního stavu. Stacionární stav zcela vpravo je tedy stabilní. Podobně ukážeme, že stacionární stav odpovídající průsečíku zcela vlevo je také stabilní. Naopak, stacionární stav uprostřed je nestabilní, libovolná výchylka z tohoto stavu způsobí přechod systému do některého ze stabilních stavů. Online model.
Logistická diferenciální rovnice s predátory
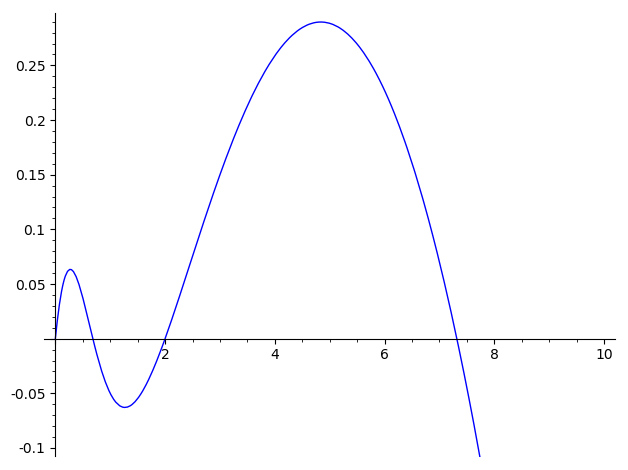
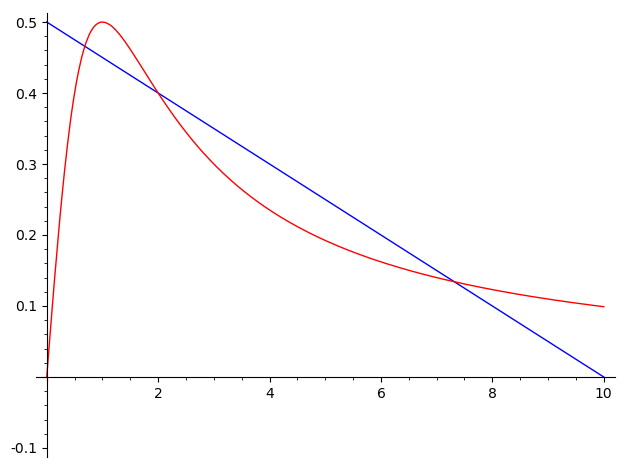
Následující model je model obaleče Choristoneura fumiferana, který periodicky atakuje lesy severní Ameriky. Jeho populace je relativně malá, ale některé roky (historicky cca po 40 letech) se velikost populace zvýší tisícinásobně a dokáže zahubit \(80\%\) stromů v lese a prakticky zničit les. Populaci je možno modelovat logistickou rovnicí \[y'=ry\left(1-\frac yK\right)-H\frac{y^2}{y^2+A^2},\] kde druhý člen na pravé straně charakterizuje vliv predátorů. Jedná se o funkci, která zpomaluje růst, podobně jako lov. Protože však predátoři mají určitou hodnotu, nad kterou jsou saturovaní a nestačí brzdit růst populace, je tato funkce ohraničená. Platí \[H\frac{y^2}{y^2+A^2} \leq H.\] To má dalekosáhlé důsledky. Pro určité hodnoty parametrů může mít pravá strana rovnice dva nebo čtyři nulové body. Nakreslíme si druhou variantu.
Vidíme dva průsečíky, kde je funkce rostoucí, to odpovídá nestabilním stavům. Vidíme i dva stabilní stavy, přibližně pro hodnoty \(0.6\) a \(7.3\). Malé populace, které se rozvíjejí od nuly, dospějí do nižšího stabilního stavu. Pokud se nějakým způsobem změní velikost populace o malé množství, systém se po čase díky stabilitě vrátí do původního stavu. Pokud však skok je velký a systém populace se dostane nad hodnotu nestabilního stavu, růst pokračuje a systém spěje ke stabilitě, ale s vyšším výskytem škůdce odpovídající stacionárnímu bodu \(7.3\).
Poněkud jednodušší je kvalitativní analýza, pokud zvolíme jednotku veličiny \(y\) tak, aby koeficient \(A\) byl roven jedné, zvolíme jednotku času tak, aby koeficient \(H\) byl roven jedné a vytkneme proměnnou \(y\). Model má potom tvar \[y'=y\left [ r\left(1-\frac yK\right)-\frac{y}{y^2+1}\right].\] Na pravé straně v hranaté závorce zůstává rozdíl funkce \(\frac{y^2}{y^2+1}\) neobsahující žádný parametr a lineární funkce, se kterou snadno dokážeme manipulovat. Ukázka možné vzájemné polohy křivek je na obrázku.
Brauer a Kirbs vysvětlují situaci tak, že s růstem lesa se mění parametry modelu, stacionární body se posunují a populace obaleče se tomu přizpůsobuje. Více stromů znamená vyšší nosnou kapacitu prostředí pro obaleče a predátoři svou činností populaci obaleče udržují na rozumné míře. Pokud však nosná kapacita prostředí dosáhne takové hodnoty, že predátoři jsou nasycení a nestačí populaci redukovat, odpovídá to posunu nestabilního stacionárního bodu pod hodnotu velikosti populace a dojde k přemnožení. Toto přemnožení má devastující účinky pro les.
Autonomní systém ve dvou dimenzích, vektorový zápis
Následující příklad je mírně modifikovaný příklad z kurzu MIT o diferenciálních rovnicích. Budeme modelovat ohřívání vejce ve vodě o konstantní teplotě \(T_0\). Na počátku mají bílek a žloutek teplotu \(T_1\) a \(T_2\). Žloutek přebírá teplo od bílku rychlostí úměrnou rozdílu teplot žloutku a bílku. Bílek přebírá teplo od vodní lázně rychlostí úměrnou rozdílu teplot a předává teplo žloutku procesem popsaným v předchozí větě. Vody je hodně a její teplota se nemění. Proces můžeme modelovat soustavou diferenciálních rovnic \[\begin{aligned}T_1^\prime &= k_1(T_0-T_1)-k_2(T_1-T_2) \\ T_2^\prime&=k_2(T_1-T_2)\end{aligned}\] Tento systém je možno přepsat do tvaru \[\begin{aligned}T_1^\prime &= -(k_1+k_2)T_1+k_2T_2+T_0k_1 \\ T_2^\prime&=k_2T_1-k_2T_2\end{aligned}\] a zapsat maticově \[\begin{pmatrix}T_1\\T_2\end{pmatrix}'=
\begin{pmatrix}-(k_1+k_2) & k_2 \\ k_2 & -k_2\end{pmatrix}
\begin{pmatrix}T_1\\T_2\end{pmatrix}
+
\begin{pmatrix}k_1T_0\\0\end{pmatrix}.
\] Pokud zvolíme teplotní stupnici tak, že teplota vroucí vody je v naší nové stupnici nula, můžeme dokonce eliminovat druhý člen a dostáváme \[\begin{pmatrix}T_1\\T_2\end{pmatrix}'=
\begin{pmatrix}-(k_1+k_2) & k_2 \\ k_2 & -k_2\end{pmatrix}
\begin{pmatrix}T_1\\T_2\end{pmatrix}
\] tj. symbolicky \(X'=AX\), kde \(X=(T_1,T_2)^T\) je vektorová funkce (sloupcový vektor) a \(A\) je \(2\times 2\) matice.
Autonomní systém \(X'=AX\)
Je-li determinant matice nenulový, má soustava \(AX=0\) pouze nulové řešení a systém \[X'=AX\] má jediné konstantní řešení, kterým je počátek. Konstantní řešení bude nazývat stacionární bod.
Tento autonomní systém můžeme přepsat na \[X'-AX=0\] a tento systém je lineární, protože díky distributivnímu zákonu pro matice pro operátor \(L[X]=X'-AX\) platí \[\begin{aligned}L[X_1+X_2]&=(X_1+X_2)'-A(X_1+X_2)\\&=X_1^\prime+X_2^\prime-AX_1 -AX_2\\&=(X_1^\prime -AX_1)+(X_2^\prime-AX_2)\\&=L[X_1]+L[X_2]\end{aligned}\] a díky komutativitě při násobení s konstantou \(C\in\mathbb R\) také \[L[CX]=(CX)'-A(CX)=CX'-CAX=C(X'-AX)=CL[X].\]
Je možné ukázat, že každá počáteční úloha je jednoznačně řešitelná a pro obecné řešení stačí najít tolik nezávislých řešení, kolik komponent má neznámá vektorová funkce \(X\). Platí následující věta, kterou je možno ověřit přímo dosazením.
Věta (souvislost vlastních čísel matice a řešení autonomního systému).
Má-li matice \(A\) vlastní číslo \(\lambda\) a příslušný vlastní vektor je \(v\), tj. platí \(A v =\lambda v\), je funkce \(X(t)=v e^{\lambda t}\) řešením systému \(X'=AX.\) Jsou-li \(\lambda\) a \(v\) komplexní, je řešením i samostatně reálná část a imaginární část.
Autonomní systém \[X'=AX+B\tag{2}\] je možno na předchozí případ převést po přepsání do tvaru \((X-X_0)'=A(X-X_0)\), kde \(X_0\) je řešením soustavy \(AX+B=0\), což odpovídá posunu stacionárního bodu do počátku.
Poznámka (vlastní hodnoty a řešení).
Následující poznatky jsou shrnutím a specifikací výše uvedeného a klasifikují stabilitu některých řešení systému (2), tj. \[X'=AX+B.\]
- Jakmile má systém reálnou kladnou vlastní hodnotu, existuje řešení, které se vzdaluje od stacionárního bodu směrem daným příslušným vlastním vektorem.
- Jakmile má systém reálnou zápornou vlastní hodnotu, existuje řešení, které se přibližuje ke stacionárnímu bodu ze směru daného příslušným vlastním vektorem.
- Jakmile má systém komplexní hodnotu s kladnou reálnou částí, existuje řešení, které se v oscilacích vzdaluje od stacionárního bodu.
- Jakmile má systém komplexní hodnotu se zápornou reálnou částí, existuje řešení, které se v oscilacích přibližuje ke stacionárnímu bodu.
Pokud jsou například všechna vlastní čísla v daném bodě záporná, poté takto čísla generují řešení konvergující do stacionárního bodu. Díky linearitě, jednoznačnosti řešení a tomu, že máme tolik řešení, kolik je nutno pro splnění libovolné podmínky, je možné pomocí těchto dílčích řešení zapsat i libovolné jiné řešení. Tím pádem ale všechna řešení konvergují do stacionárního bodu. Podobně, pokud všechny vlastní hodnoty jsou kladné, všechna řešení se od stacionárního bodu vzdalují.
Příklad. Model ohřívání vajíčka z předchozí části této přednášky má stacionární bod \((0,0)\). Zkusíme zvolit parametry \(k_1\) a \(k_2\) a určit chování trajektorií v okolí tohoto bodu. Pro \(k_1=1\) a \(k_2=2\) dostáváme \[\begin{pmatrix}T_1\\T_2\end{pmatrix}'=
\begin{pmatrix}-3 & 2 \\ 2 & -2\end{pmatrix}
\begin{pmatrix}T_1\\T_2\end{pmatrix}.
\] Charakteristická rovnice je \[\lambda^2+5\lambda+2=0\] se dvěma zápornými kořeny \(\lambda_{1,2}=\frac{-5\pm\sqrt{25-8}}{2}=\cdots\). Budou tedy existovat dvě nezávislá řešení konvergující do počátku a všechna další řešení dostaneme jako jejich lineární kombinaci. Proto všechna řešení konvergují k počátku tj. \(T_1=T_2=0\). Obě teploty v naší posunuté stupnici se tedy ustálí na teplotě vodní lázně. Nic jiného jsme ani nečekali, ať mají žloutek a bílek na začátku jakoukoliv teplotu, po čase se teplota ustálí na teplotě vodní lázně. V tomto případě není zajímavé vědět, do jakého stavu systém konverguje, ale například za jak dlouho bude dosaženo potřebné teploty ve žloutku nebo v bílku. V praxi se podobným způsobem neřeší vaření vajec, ale předávání chemických látek jako jsou léky nebo enzymy mezi tkáněmi, prostřednictvím krve. Podobně jako u Newtononova zákona tepelné výměny, i zde je rychlost procesu úměrná množství, v tomto případě úměrná rozdílu koncentrací.
Mechanický oscilátor
S mechanickým oscilátorem se setkáváme tam, kde je systém vychýlen z rovnováné polohy a nějaká síla jej do této rovnovážné polohy vrací. Přičemž v některých situacích dojde (například vlivem setrvačnosti) k tomu, že systém se přehoupne přes rovnovážnou polohu na opačnou stranu a vrací se zpět. Klasickým případem je těleso o hmotnosti \(m\) na pružině. Pokud sílu závisející na rychlosti \(v\) a výchylce \(x\) označíme \(F\), dostáváme \[\begin{aligned}\frac {\mathrm dx}{\mathrm dt}&=v, \\ \frac {\mathrm dv}{\mathrm dt}&=\frac 1m F(v,x), \end{aligned}\] přičemž první rovnice vyjadřuje, že rychlost je derivace polohy a druhá rovnice je Newtonův zákon síly. Pro pružinu tuhosti \(k\) a odpor prostředí úměrný rychlosti dostáváme \[\begin{aligned}\frac {\mathrm dx}{\mathrm dt}&=v, \\ \frac {\mathrm dv}{\mathrm dt}&=-\frac km x - bv,\end{aligned}\] nebo ve vektorovém tvaru \[\frac{\mathrm d}{\mathrm dt}\begin{pmatrix}x\\v \end{pmatrix}=\begin{pmatrix}0&1\\-\frac km & -b \end{pmatrix}\begin{pmatrix}x\\v \end{pmatrix}.\] Charakteristická rovnice je \[\begin{vmatrix}-\lambda&1\\-\frac km & -b-\lambda \end{vmatrix}=-\lambda (-b-\lambda)+\frac km = \lambda^2+b\lambda + \frac km=0.\] Pro velké tlumení, tj. \(b^2> \frac {4k}m\) má rovnice dva záporné reálné kořeny \[\lambda_{1,2}=\frac{- b \pm \sqrt{b^2-\frac{4k}{m}}}{2}\] Systém se tedy bez oscilací překlopí do rovnovážného stau. Při opačné nerovnosti jsou kořeny charakteristické rovnice \[\lambda_{1,2}=-\frac{b}{2} \pm \frac 12 i \sqrt{-b^2+\frac{4k}{m}}\] komplexní a systém osciluje okolo rovnovážné polohy. Pro \(b>0\) mají tyto kořeny zápornou reálnou část a systém osciluje okolo rovnovážné polohy se zmenšující se amplitudou. Pro \(b=0\) se amplituda nezmenšuje a oscilátor kmitá do nekonečna. Případ \(b<0\) neuvažujeme, protože odpor prostředí je síla působící proti pohybu.
Poznámka (diferenciální rovnice druhého řádu).
Uvažovaný systém se v literatuře často vyskytuje ve tvau, kdy je rychlost \(v\) dosazena do druhé rovnice a poté dostáváme model ve tvaru \[\frac{\mathrm d^2 x}{\mathrm dt^2}=-\frac km x - b \frac{\mathrm dx}{\mathrm dt}, \] tj. ve tvaru rovnice obsahující první dvě derivace neznámé funkce. V podstatě celá klasická mechanika je založena právě na rovnicích tohoto typu.
Autonomní systém \(X'=f(X)\)
Obecný autonomní systém nemusí být lineární. Například při modelování chemických reakcí je rychlost úměrná mocnině koncentrace reagujících látek odpovídající počtu molekul, které do reakce vstupují. Na dalším slidu uvidíme příklad takového modelu.
Ukážeme si, jak studovat nelineární systém pomocí lineárního a pomocí vlastních čísel. Půjde o lineární aproximaci. V tomto případě o lineární aproximaci vektorové funkce definující pravé strany rovnic.
Je-li \(f(X_0)=0\), je možno systém \[X'=f(X)\] v okolí bodu \(X_0\) aproximovat lineárním systémem \[X'=J(X_0)(X-X_0),\] kde \(J(X_0)\) je Jacobiho matice funkce \(f(X)\) v bodě \(X_0\), tj. pro \(f(X)=(f_1(X),\dots,f_n(X))^T\) je \[J(X)=\left(\frac{\partial f_i(X_0)}{\partial x_j}\right).\] O chování trajektorrií v okolí stacionárního bodu tedy rozhodnou vlastní čísla Jacobiho matice. Za předpokladu, že jsme relativně daleko od případů, kdy se mění typ stacionárního bodu, tj. vlastní čísla jsou navzájem různá, jsou nenulová a v případě komplexních vlastních čísel mají nenulové reálné části, má původní nelineární systém stejný typ stacionárního bodu jako lineární systém s Jacobiho maticí. Nelineární systém tedy v jistém smyslu “zdědí” chování řešení od své lineární aproximace pomocí Jacobiho matice. Je však nutno připomenout, že aproximace pomocí Jacobiho matice je jenom lokální a můžeme takto posoudit jenom řešení z nějakého okolí stacionárního bodu.
Zejména tedy, pokud má Jacobiho matice všechny vlastní hodnoty záporné, tak všechna řešení z nějakého okolí stacionárního bodu konvergují do tohoto bodu. Pokud má všechny vlastní hodnoty kladné, všechna řešení z nějakého okolí se naopak od stacionárního bodu vzdalují. To platí i pro vlastní komplexní vlastní hodnoty, pouze se mezi konvergencí a vzdalování přepíná podle znaménka reálné části vlastních hodnot a řešení oscilují směrem ke stacionárnímu bodu nebo od něj.
Poznámka (stabilita a strukturální stabilita řešení).
Stabilitou stacionárního bodu budeme rozumět, stejně jako výše, že malá výchylka od stacionárního bodu vede na řešení, které konverguje zpět k tomuto stacionárnímu bodu. Stabilita vyjadřující, že při malé změně koeficientů v systému se nezmění typ singulárních bodů se nazývá strukturální stabilita.
Bruselátor
Systém chemických reakcí \[\begin{aligned}A &\rightarrow X\\2X + Y &\rightarrow 3X\\B + X &\rightarrow Y + D\\X &\rightarrow E\end{aligned}\] má pozoruhodnou minulost. První chemickou reakci probíhající podle tohoto schematu objevil ruský chemik B. Bělousov, jeho výsledky přezkoumal a potvrdil A. Žabotinský. Oba zaznamenali překvapivé chování, kdy se periodicky mění koncentrace. Protože to bylo v roce 1951 mimo chápání chemiků, měli potíže s publikováním tohoto převratného jevu. Všeobecně totiž panoval názor, že chemická reakce rychle spěje ke stavu termodynamické rovnováhy a oscilující reakce byla něco jako chemické perpetum mobile. Později matematikové (I. Prigogine) sestavili teoretický model periodicky probíhající reakce a po čase několik takových reakcí i našli. Dnes toto chápeme jako jakési chemické hodiny. Název bruselátor je spojení slova Brusel (pracoviště I. Prigogina) a oscilátor.
Pokud je dostatek složek \(A\) a \(B\), modeluje po zjednodušení (viz Wikipedie, konstanty úměrnosti klademe rovny jedné) chemické reakce soustava \[
\begin{aligned}
\frac {\mathrm d X}{\mathrm dt}&= A + X ^2 Y - B X - X,\\
\frac {\mathrm d Y}{\mathrm dt}&= BX-X^2Y,
\end{aligned}
\] kde \(X\) pro jednoduchost znamená koncentraci látky \(X\) a totéž platí i pro další veličiny vystupující v rovnici.
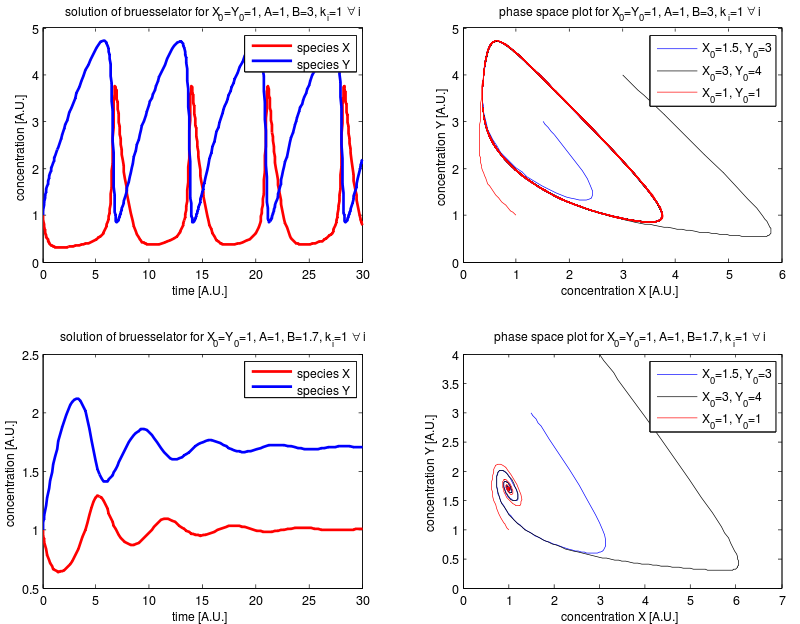
Stacionárním bodem je bod \(X=A\), \(Y=\frac BA\). Pro \(A=1\) a \(B=4\) má systém tvar \[
\begin{aligned}
\frac {\mathrm d X}{\mathrm dt}&= X ^2 Y - 5 X,\\
\frac {\mathrm d Y}{\mathrm dt}&= 4X-X^2Y,
\end{aligned}
\]
Jacobiho matice je \[J(X,Y)=\begin{pmatrix}2XY-5 & X^2 \\ 4-2XY & -X^2\end{pmatrix}\] a \[J(1,4)=\begin{pmatrix}3& 1\\-4 & -1\end{pmatrix}.\] Vlastní čísla jsou řešením rovnice \[0=\begin{vmatrix}3-\lambda & 1\\-4 & -1-\lambda\end{vmatrix}
=\lambda^2- 2\lambda+4=(\lambda-1)^2+3.\] Taková rovnice nemá řešení v množině reálných čísel a vlastní čísla jsou komplexně sdružená \[\lambda_{1,2}=1\pm \sqrt {3}i.\] Protože reálná část \(\Re(\lambda_i)=1>0\), řešení se v oscilacích vzdalují od rovnovážného bodu. Protože systém je druhého řádu a tímto postupem je možno získat dvě nezávislá řešení, lineárními kombinacemi vygenerujeme všechna řešení. Proto se v oscilacích budou od stacionárního bodu vzdalovat všechna řešení. Další stacionární bod neexistuje a koncentrace určitě zůstanou ohraničené z fyzikálních důvodů. Proto neexistuje stabilní stav, a systém je nestabilní. Je možné ukázat, že systém není chaotický, ale oscilacemi se přibližuje k periodickému řešení. Taková analýza je však již nad rámec základního seznámení se s aparátem autonomních systémů.
Autonomní systém ve dvou dimenzích
Ve dvou dimenzích je autonomní systém možno psát ve tvaru \[ \begin{aligned}
x'=f(x,y),\\
y'=g(x,y).
\end{aligned}\] Řešení \(x(t)\), \(y(t)\) definuje parametrickou křivku v rovině, která se nazývá trajektorie. Dvě různé trajektorie se nemohou protnout díky jednoznačné řešitelnosti. Díky tomu existuje jenom několik málo druhů trajektorií.
- Stacionární body. Tyto body odpovídají konstantním řešením.
- Uzavřené trajektorie, cykly. Tyto trajektorie odpovídají periodickým řešením. Uvnitř každého cyklu leží alespoň jeden stacionární bod.
- Trajektorie, které samy sebe nikde neprotínají a pro \(t\to\pm\infty\) tyto trajektorie mají jednu z následujících vlastností.
- Trajektorie mají alespoň jednu složku neohraničenou.
- Trajektorie konvergují k některému ze stacionárních bodů.
- Trajektorie konvergují k některému z cyklů.
- Trajektorie konvergují k množině tvořené konečným počtem singulárních bodů a jinými trajektoriemi, které vedou z jednoho stacionárního bodu do druhého. S tímto typem trajektorií se však v jednoduchých modelech nesetkáme.
Podle chování trajektorií v okolí stacionárních bodů rozdělujeme tyto stacionární body do několika navzájem disjunktních skupin. Dokážeme je identifikovat pomocí vlastních hodnot Jacobiho matice vypočtené v tomto stacionárním bodě.
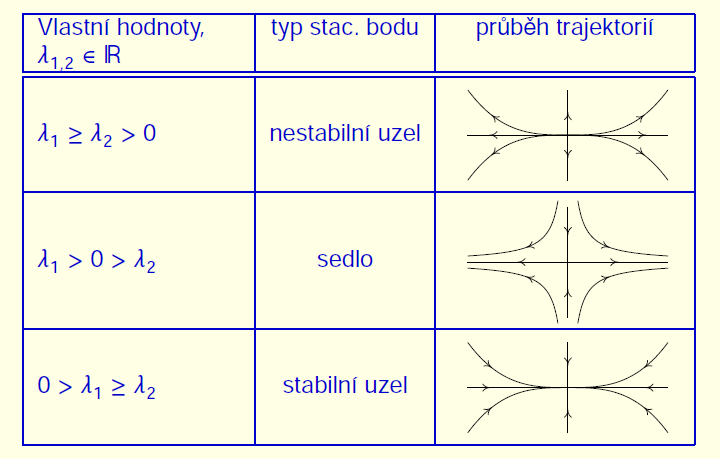
- Stabilní uzel je stacionární bod takový, že pro \(t\to\infty\) všechny trajektorie z nějakého okolí konvergují do tohoto bodu bez oscilací. Nestabilní uzel má stejnou vlastnost, ale pro \(t\to-\infty\). Stabilní uzel poznáme podle dvou záporných a nestabilní uzel podle dvou kladných reálných vlastních hodnot.
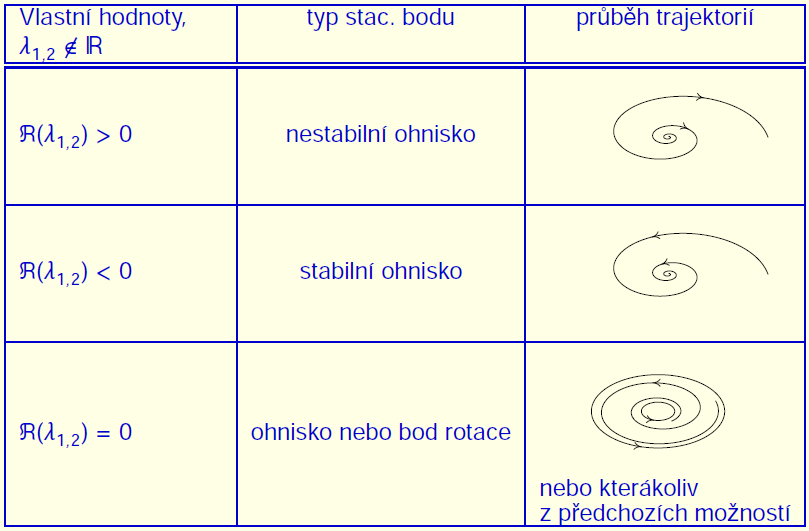
- Stabilní a nestabilní ohnisko je stacionární bod se stejnou vlastností jako uzel, ale konvergence je spojena s oscilacemi okolo stacionárního bodu. Stabilní ohnisko poznáme podle dvou komplexně sdružených vlastních hodnot se zápornou reálnou částí, nestabilní ohnisko s kladnou reálnou částí.
- Sedlo je stacionární bod, který má v každém okolí pouze konečný počet trajektorií, které pro \(t\to\pm\infty\) konvergují k tomuto bodu. Poznáme jej podle jedné kladné a jedné záporné vlastní hodnoty.
- Bod rotace je takový bod, v jehož každém okolí jsou cykly. Pokud navíc v nějakém okolí existují pouze cykly, nazývá se tento bod navíc střed. Bod rotace souvisí s komplexně sdruženými vlastními čísly s nulovou reálnou částí, ale v těchto případech může stacionární bod být i ohniskem.
Základní modely populační ekologie
Populační ekologie je součást ekologie zabývající se modelováním vývoje populací. Základním vyjadřovacím jazykem jsou dierenciální rovnice nebo jejich diskrétní obdoba, kdy se čas mění po skocích, diferenční rovnice. Málokdy uvažujeme jedinou populaci, většinou studujeme bohatší ekosystémy, což vede na soustavy rovnic. Dva nejklasičtější si zde stručně uvedeme a prostudujeme ve cvičení.
Model konkurence dvou druhů
Situace kdy dva druhy žijí ve společné lokalitě a přítomnost jednoho druhu ovlivňuje druhý druh je modelována autonomním systémem \[
\begin{aligned}
\frac{\mathrm dx}{\mathrm dt}&=x r_1 (1-a x-by),\\
\frac{\mathrm dy}{\mathrm dt}&=y r_2 (1-c x-dy).
\end{aligned}
\] Tento systém vychází z logistické rovnice pro každou z populací s doplněním členů \(r_1 bxy\) a \(r_2 cxy\), které charakterizují mezidruhovou konkurenci. Ukazuje se, že tento systém má kapacitu popsat všechny v přírodě pozorované druhy interakcí (slabá konkurence, silná konkurence, dominance jednoho z druhů) a je výchozím systémem pro veškeré modely používané v populační ekologii.
Model dravce a kořisti
Skutečnost kdy žijí ve společné lokalitě a přítomnost jednoho druhu umožňuje přežití druhého je modelována autonomním systémem \[
\begin{aligned}
\frac{\mathrm dx}{\mathrm dt}&=x r (1-a x) -V(x)y,\\
\frac{\mathrm dy}{\mathrm dt}&=y (-\alpha+kV(x)).
\end{aligned}
\] V tomto případě je \(V(x)\) trofická funkce. Pro \(V(x)=k_0x\) a \(a=0\), (tj. pro nenažrané dravce kteří nejsou nikdy saturováni a bez vnitrodruhové konkurence v populaci kořisti) dostáváme klasický Lotkův-Voterrův model, který v jistém smyslu odstartoval využití matematiky v modelování biologických systémů. Povedlo se mu vysvětlit oscilace mezi populacemi kořisti a dravce. Přes tento úspěch se však pro praktické modelování využívají dokonalejší modely. Zejména je nutno uvažovat ohraničenou trofickou funkci.
Vícerozměrné autonomní systémy, kompartmentové modely
Kompartmentové modely jsou modely, kde se je studovaná veličina rozdělena do několika stavů a mezi těmito stavy se v jakémsi smyslu přelévá definovanou rychlostí. Klasickým případem v roce 2020 je model epidemie, například SIR model nebo SEIR model.