Lineární algebra (soustavy lineárních rovnic, transformace tenzorů)
Robert Mařík
16.4.2019
Pokud se matematické výrazy nezobrazují korektně, nechejte znovunačíst stránku (Reload, Crtl+R, F5) nebo použijte alternativní verzi prezentace.
Ovládání: Prezentaci je možno posouvat šipkami nebo mezerníkem. Klávesa "S" zmenšuje písmo, "B" zvětšuje (smaller/bigger). Klávesa "C" zobrazí obsah (content). Klávesou "A" se přepíná režim prezentace/html stránka.
Kliknutím na obrázek se obrázek zvětší na vertikální rozměr okna. Pro zavření zvětšeniny klikněte do zašedlého zbytku stránky nebo použijte klávesu "ESC".
Slidy jsou doprovodným materiálem k předáškám. Některá tvrzení platí
pouze za předpokladů dostatečné spojitosti funkcí nebo jejich
derivací. V jednoduchých technických aplikacích bývají tyto
předpoklady splněny a proto je nezmiňujeme. Přesná formulace vět je
v učebním textu a v odborné literatuře.
Varianty zápisu soustavy lineárních rovnic
Uvažujme následující tři problémy:
- Najděte všechna reálná čísla \(x_1\), \(x_2\), splňující dvojici rovnic \[ \begin{aligned} 4x_1&+5x_2=7\\ \phantom{4}x_1&-2x_2=4 \end{aligned} \]
- Najděte všechna reálná čísla \(x_1\), \(x_2\), splňující vektorovou rovnici \[ \begin{aligned} \begin{pmatrix} 4\\1 \end{pmatrix} x_1 + \begin{pmatrix} 5\\-2 \end{pmatrix} x_2 = \begin{pmatrix} 7\\4 \end{pmatrix} \end{aligned}\]
- Najděte všechna reálná čísla \(x_1\), \(x_2\), splňující maticovou rovnici \[\begin{aligned} \begin{pmatrix} 4&5\\1&-2 \end{pmatrix} \begin{pmatrix} x_1\\x_2 \end{pmatrix} = \begin{pmatrix} 7\\4 \end{pmatrix} \end{aligned} \]
Všechny problémy jsou ekvivalentní a jedná se o jiný zápis téhož. Jednou však používáme soustavu rovnic, vektory a jejich lineární kombinaci a jednou matice a maticový součin!
Soustava lineárních rovnic
Definice (soustava lineárních rovnic).
Soustavou \(m\) lineárních rovnic o \(n\) neznámých nazýváme soustavu rovnic \[ \tag{1}
\begin{gathered}
a_{11}x_1+a_{12}x_2+a_{13}x_3+\cdots+a_{1n}x_n=b_1 \\
a_{21}x_1+a_{22}x_2+a_{23}x_3+\cdots+a_{2n}x_n=b_2 \\
a_{31}x_1+a_{32}x_2+a_{33}x_3+\cdots+a_{3n}x_n=b_3 \\
\vdots \\
a_{m1}x_1+a_{m2}x_2+a_{m3}x_3+\cdots+a_{mn}x_n=b_m
\end{gathered} \] Proměnné \(x_1\), \(x_2\), , \(x_n\) nazýváme neznámé. Reálná čísla \(a_{ij}\) nazýváme koeficienty levých stran, reálná čísla \(b_j\) koeficienty pravých stran soustavy rovnic. Řešením soustavy rovnic rozumíme uspořádanou \(n\)-tici reálných čísel \([t_1, t_2, \ldots, t_n]\) po jejichž dosazení za neznámé (v tomto pořadí) do soustavy dostaneme ve všech rovnicích identity.
Definice (matice soustavy).
Matici \[
A=\left(
\begin{matrix}
a_{11}& a_{12}& a_{13}& \cdots{}& a_{1n}\\
a_{21}& a_{22}& a_{23}& \cdots{}& a_{2n}\\
\vdots{} &\vdots{}& {} &\ddots{}& \vdots{}\\
a_{m1}& a_{m2}& a_{m3}& \cdots{}& a_{mn}\\
\end{matrix}\right)
\] nazýváme maticí soustavy (1). Matici \[
A_r=\left(
\begin{array}{ccccc|c}
a_{11}& a_{12}& a_{13}& \cdots{}& a_{1n}&b_1\\
a_{21}& a_{22}& a_{23}& \cdots{}& a_{2n}&b_2\\
\vdots{} &\vdots{}& {} &\ddots{}& \vdots{}&\vdots\\
a_{m1}& a_{m2}& a_{m3}& \cdots{}& a_{mn}&b_m\\
\end{array}
\right)
\] nazýváme rozšířenou maticí soustavy (1).
Vektorový zápis soustavy lineárních rovnic
Soustavu (1) lze ekvivalentně přepsat do vektorového tvaru \[ \begin{pmatrix}
a_{11}\\a_{21}\\\vdots\\a_{m1}
\end{pmatrix}
x_1+
\begin{pmatrix}
a_{12}\\a_{22}\\\vdots\\a_{m2}
\end{pmatrix}
x_2+
\begin{pmatrix}
a_{13}\\a_{23}\\\vdots\\a_{m3}
\end{pmatrix}
x_3+\cdots+
\begin{pmatrix}
a_{1n}\\a_{2n}\\\vdots\\a_{mn}
\end{pmatrix}
x_n=
\begin{pmatrix}
b_{1}\\b_{2}\\\vdots\\b_{m}
\end{pmatrix}.
\] Vidíme tedy, že se vlastně jedná o problém, vyjádřit vektor složený z čísel na pravé straně soustavy rovnic jako lineární kombinaci vektorů, které tvoří sloupce matice soustavy.
Maticový zápis soustavy lineárních rovnic
Soustavu (1) lze ekvivalentně přepsat do maticového tvaru pomocí maticového součinu \[
\left(
\begin{matrix}
a_{11}& a_{12}& \cdots{}& a_{1n}\\
a_{21}& a_{22}& \cdots{}& a_{2n}\\
\vdots{} &\vdots{} &\ddots{}& \vdots{}\\
a_{m1}& a_{m2}& \cdots{}& a_{mn}\\
\end{matrix}\right)
\left( \begin{matrix}
x_1\\x_2\\ \vdots \\x_n
\end{matrix}
\right) = \left( \begin{matrix}
b_1\\b_2\\ \vdots \\b_m
\end{matrix}
\right).
\] Tento tvar se používá často v inženýrských výpočtech pro úspornost. Symbolicky zpravidla píšeme soustavu lineárních rovnic ve tvaru \[
A\vec x=\vec b,
\] nebo \[AX=B\] kde \(A\) je matice soustavy a \(\vec b\) resp. \(B\) je vektor pravých stran.
Hodnost matice
Matice řádu \(m\times n\) obsahuje celkem \(m\cdot n\) čísel. Jedná se tedy o relativně komplikovaný objekt. V matematice se často snažíme složitější objekty nějakým způsobem charakterizovat pomocí objektů jednodušších, např. pomocí čísel. Jedno už známe, determinant. Dalším z těchto čísel je hodnost matice, kterou si nadefinujeme nyní.
Definice (hodnost matice).
Buď \(A\) matice. Hodností matice rozumíme maximální počet lineárně nezávislých řádků matice. Hodnost matice \(A\) označujeme \({h(A)}\).
Poznámka: Hodnost je v anglické literatuře označována jako rank.
Schodovitý tvar jsme si představili u determinantu. U matice ve schodovitém tvaru je určení determinantu velmi jednoduché. Podobný efekt vidíme i u hodnosti.
Definice (schodovitý tvar).
Řekneme, že matice \(A\) je ve schodovitém tvaru, jestliže případné nulové řádky jsou uspořádány na konci matice a nenulové jsou uspořádány tak, že každý následující řádek začíná větším počtem nul než řádek předchozí.
Věta (hodnost matice ve schodovitém tvaru).
Hodnost matice, která je ve schodovitém tvaru je rovna počtu jejích nenulových řádků.
Příklad. Matice \(A= \begin{pmatrix} 2&2&2&3&-1&5\\ 0&0&1&0&0&3\\ 0&0&0&-1&2&1\\ 0&0&0&0&0&0 \end{pmatrix}\) je ve schodovitém tvaru a \(h(A)=3\). Matice \(B= \begin{pmatrix} 2&2&2&3&-1&5\\ 0&0&1&0&0&3\\ 0&0&3&-1&2&1 \end{pmatrix}\) není ve schodovitém tvaru a její hodnost na první pohled nepoznáme.
Výpočet hodnosti
Výpočet hodnosti se provádí postupným nahrazením zadané matice maticí, která má stejnou hodnost, ale postupně se přibližuje schodovitému tvaru. Uvedeme si jenom základní postup. Tento se sice dá vylepšit, pro nás je však důležité, že i bez jakýchkoliv vylepšení vždy vede k cíli. (Alespoň teoreticky.)
Věta (řádkové operace zachovávající hodnost matice).
Následující operace nemění hodnost matice:
- vynechání řádku složeného ze samých nul, nebo vynechání řádku, který je totožný s jiným řádkem, nebo vynechání řádku, který je násobkem jiného řádku,
- vynásobení nebo vydělení libovolného řádku nenulovým číslem,
- záměna pořadí řádků,
- ponechání jednoho řádku beze změny a opakované přičtení libovolných násobků tohoto řádku k nenulovým násobkům ostatních řádků matice.
Libovolnou matici lze konečným počtem těchto úprav převést do schodovitého tvaru.
Následující věta udává, že veškerá tvrzení, uvedená v souvislosti s hodností pro řádky matice, se dají přeformulovat i pro sloupce matice.
Věta.
Transponování nemění hodnost matice.
Existence a jednoznačnost řešení soustavy lineárních rovnic
V případě, že matice soustavy je čtvercová již víme, že řešení je určeno jednoznačně právě tehdy, když má matice soustavy matici inverzní. O počtu řešení v obecném případě obdélníkové matice, kdy matici inverzní nemá smysl uvažovat, nám dávají informaci dvě následující věty. První se týká existence řešení a druhá identifikuje případ, kdy řešení je určeno jednoznačně.
Věta (Frobeniova věta, Kronecker-Capelliho věta).
Soustava lineárních rovnic je řešitelná právě tehdy, když její matice soustavy a rozšířená matice soustavy mají stejnou hodnost.
Věta (jednoznačnost řešení).
Nechť soustava lineárních rovnic má řešení. Toto řešení je právě jedno, pokud je společná hodnost matice soustavy a rozšířené matice soustavy rovna počtu neznámých. V opačném případě je společná hodnost matice a rozšířené matice soustavy menší než počet neznámých.
Gaussova eliminace
Spočívá v reprezentaci soustavy pomocí rozšířené matice soustavy a převodu této matice na schodovitý tvar pomocí řádkových operací zachovávajících hodnost. Tyto operace zachovávají i množinu řešení soustavy. Jakmile je matice ve schodovitém tvaru, zpětnou substitucí postupně dopočítáváme jednotlivé proměnné. (Formálně to u čtvercových regulárních matic odpovídá použití inverzní matice k matici, která má pod hlavní diagonálou nuly. Ale postup funguje i pro obecnější matice a dá se realizovat jednoduchými prostředky a postupným dosazováním.)
Gaussova eliminace je velice flexibilní a univerzální, umožní nám řešit i soustavy mající nekonečně mnoho řešení. V tomto případě dokážeme zapsat řešení pomocí parametrů.
Příklad.
\[
\begin{aligned}
x_1+2x_2+2x_3+x_4&=0\\
x_1-x_2+x_3-2x_4&=1\\
x_2-2x_3+x_4&=2
\end{aligned}
\]
Rozšířená matice soustavy je \[\left(
\begin{array}{cccc|c}
1& 2& 2& 1& 0\\
1& -1& 1& -2& 1\\
0& 1& -2& 1& 2
\end{array}\right)
\]
V prvním kroku převedeme na tvar, kdy jednom jeden řádek začíná nenulovým prvkem. První řádek už nijak neupravujeme a opíšeme jej. Místo druhého řádku napíšeme jeho součet s \((-1)\)-násobkem prvního řádku. \[ \left( \begin{array}{cccc|c}
1& 2& 2& 1& 0\\
0& -3& -1& -3& 1\\
0& 1& -2& 1& 2
\end{array}\right)
\]
V dalším kroku převedeme na tvar, kdy z řádků začínajících jednou nulou ponecháme jenom jeden a ostatní upravíme tak, aby začínaly alespoň dvěma nulami. K tomu je vhodné nejprve přehodit poslední dva řádky, abychom mohli použít k vytváření nul jedničku. \[ \left( \begin{array}{cccc|c}
1& 2& 2& 1& 0\\
0& 1& -2& 1& 2\\
0& -3& -1& -3& 1
\end{array}\right)
\]
Nyní provedeme potřebnou úpravu. První dva řádky opíšeme. Místo třetího řádku napíšeme jeho součet s trojnásobkem druhého řádku. \[ \left( \begin{array}{cccc|c}
1& 2& 2& 1& 0\\
0& 1& -2& 1& 2\\
0& 0& -7& 0& 7
\end{array}\right)
\]
Nyní přepíšme do tvaru soustavy rovnic
\[
\begin{aligned}
x_1+2x_2+2x_3+x_4&=0\\
x_2-2x_3+x_4&=2\\
-7x_3\phantom{+x_4}&=7
\end{aligned}
\]
Z poslední rovnice máme snadno \(x_3=-1\). Tutho hodnotu použijeme ve druhé rovnici. Protože však máme pořád dvě neznámé, jednu z nich zvolíme za parametr. \[
\begin{aligned}
x_2-2x_3+x_4&=2\\
x_2+2+x_4&=2\\
x_2+x_4&=0\\
x_4&=t\\
x_2&=-t
\end{aligned}
\] Vypočtené hodnoty dosadíme do první rovnice a určíme zbývající neznámou \(x_1\). \[
\begin{aligned}
x_1+2x_2+2x_3+x_4&=0\\
x_1-2t-2+t&=0\\
x_1&=2+t
\end{aligned}
\] Řešení je \(x_1=2+t\), \(x_2=-t\), \(x_3=-1\), \(x_4=t\), kde \(t\) je libovolné reálné číslo. Vektorově (maticově) máme řešení ve tvaru \[
\begin{pmatrix}
x_1\\x_2\\x_3\\x_4
\end{pmatrix}
=
\begin{pmatrix}
2+t\\-t\\-1\\t
\end{pmatrix}
=
\begin{pmatrix}
2\\0\\-1\\0
\end{pmatrix}
+t
\begin{pmatrix}
1\\-1\\0\\1
\end{pmatrix}
.
\]
Gaussova-Seidelova iterační metoda
Gaussova-Seidelova iterační metoda je jakýsi mezikrok mezi Jacobiho iterační metodou a Gausovou eliminací. Postupujeme jako v Jacobiho metodě, ale všechny zpřesněné hodnoty použijeme okamžitě, když jsou k dispozici. Nikoliv až v další iteraci jako u Jacobiho metody. Metoda konverguje za stejných podmínek jako Jacobiho metoda, ale rychleji a přesto nevznikají vyšší nároky na výpočetní výkon.
Použijeme příklad z Wikipedie. Soustavu \[\begin{array}{rrrrl}
10x_1 &- x_2 &+ 2x_3 & & = 6, \\
-x_1 &+ 11x_2 &- x_3 &+ 3x_4 & = 25, \\
2x_1 &- x_2 &+ 10x_3 &- x_4 & = -11, \\
& 3x_2 &- x_3 &+ 8x_4 & = 15.
\end{array}\] s diagonálně dominantní maticí převedeme na iterační tvar \[
\begin{aligned}
x_1 & = x_2/10 - x_3/5 + 3/5, \\
x_2 & = x_1/11 + x_3/11 - 3x_4/11 + 25/11, \\
x_3 & = -x_1/5 + x_2/10 + x_4/10 - 11/10, \\
x_4 & = -3x_2/8 + x_3/8 + 15/8.
\end{aligned}
\] Poté vyjdeme z počátečního odhadu řešení a dosazujeme do pravých stran.
U Jacobiho metody pro počáteční odhad vypočteme nejprve všechny pravé strany a dosadíme do proměnných na levé straně jako zpřesnění počáteční aproximace. Tento postup opakujeme.
U Gaussovy-Seidlovy metody nejprve pomocí počátečního odhadu vypočteme z první rovnice \(x_1\) a tuto hodnotu ihned použijeme při výpočtu \(x_2\) z další rovnice. Obojí, \(x_1\) i \(x_2\) už využijeme při výpočtu \(x_3\) a tak dále. Po výpočtu \(x_4\) je první iterace dokončena a postup opět opakujeme, dokud dvě po sobě jdoucí iterace nejsou dostatečně blízké.
S nulovou počáteční aproximací dostáváme v prvním průchodu \[
\begin{aligned}
x_1 & = 3/5 = 0.6, \\
x_2 & = 0.6/11 + 25/11 = 2.3272, \\
x_3 & = -0.6/5 +(2.3272)/10-11/10 = -0.9873,\\
x_4 & = -3(2.3272)/8 +(-0.9873)/8+15/8 = 0.8789.
\end{aligned}
\] Jak vidno, vypočtenou hodnotu \(x_1\) ihned použijeme pro výpočet \(x_2\). Obě tyto hodnoty ihned použijeme pro výpočet \(x_3\) a tak dále. V dalších iteracích postup opakujeme. Mimo jiné hodnoty v paměti přímo přepisujeme a nemusíme držet v paměti starou a novou hodnotu.
Pootočení souřadnic v rovině
V inženýrských problémech je častou aplikací lineární algebry transformace úlohy do vhodných souřadnic, ve kterých je popis jednodušší. Zpravidla se jedná o prosté otočení. Toto se používá při studiu dřeva, které má anatomicky význačné směry, při studiu vrstvených materiálů, při studiu chování vodorovně uložených geologických vrstev. Nemusí však vždy jít jenom o materiál s charakteristickými směry. Transformace mezi souřadnicemi se používá například v letectví, kdy je jedna souřadná soustava spojena s trupem a další dvě jsou pootočené ve směru křídel šípovitě připojených k trupu.
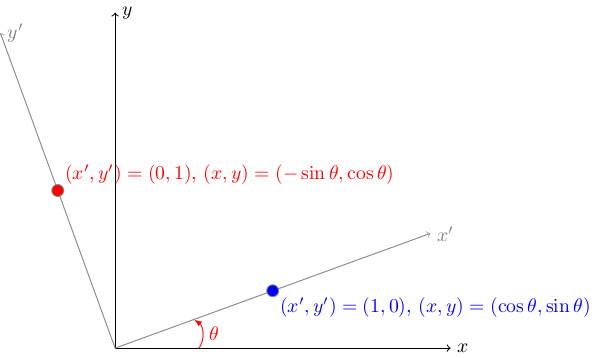
Je-li v rovině dána souřadná soustava \((x,y)\) a soustava \((x',y')\) pootočená o úhel \(\theta\) proti směru hodinových ručiček je vztah mezi souřadnicemi popsán vztahem \[
\begin{pmatrix}
x\\y
\end{pmatrix}
=
\begin{pmatrix}
\cos \theta & -\sin\theta \\ \sin\theta & \cos\theta
\end{pmatrix}
\begin{pmatrix}
x'\\y'
\end{pmatrix}.
\] To je možné zkontrolovat podle obrázku a souřadnic dvou bodů \((x',y')=(1,0)\) a \((x',y')=(0,1).\) Pro další body roviny to poté funguje automaticky.
Matici transformace budeme zkráceně označovat \(R\), pokud budeme potřebovat zdůraznit velikost úhlu, použijeme \(R(\theta)\) a pokud budeme potřebovat matici rozepsat ve složkách, budeme zkracovat výrazy \(\cos\theta\) a \(\sin\theta\) na \(C\) a \(S\) a psát \[R=
\begin{pmatrix}
C & -S \\ S & C
\end{pmatrix}.
\]
V minulé přednášce jsme viděli, že je-li \(A\) matice zobrazení v souřadnicích \((x,y)\), v souřadnicích \((x',y')\) má zobrazení vyjádření \(R^{-1}AR,\) kde \(R^{-1}=R(-\theta)= \begin{pmatrix} C&S\\-S&C \end{pmatrix}\) je matice pootočení v opačném směru. Stejným způsobem se transformují i tenzory.
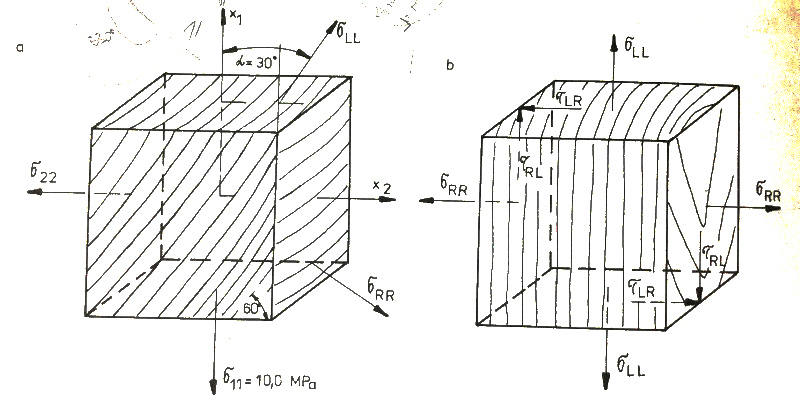
V knize A. Požgaj a kol., Štruktúra a vlastnosti dreva je následující úloha. Dřevo v konfiguraci podle obrázku je namáháno pouze tahovou silou svisle, tedy tenzor napětí má jenom jednu nenulovou složku. Naším cílem je pootočit souřadnou soustavu tak, aby byl tenzor napětí vyjádřen v anatomických směrech dřeva. Úloha je v knize vyřešena pomocí směrových kosinů. Ukážeme si alternativní způsob, který je výhodný v tom, že využívá pouze základní aparát lineární algebry. Původní souřadnice \((x_1,x_2)\) označíme \((x,y)\), osa \(x\) směřuje vodorovně vpravo (v obrázku \(x_2\)) a osa \(y\) nahoru (v obrázku \(x_1\)). Tenzor napětí je \(A= \begin{pmatrix} 0 & 0\\0& 10 \end{pmatrix}\) (tah pouze ve směru osy \(y\)). Souřadnice je nutno pootočit o \(30\) stupňů po směru hodinových ručiček, tj. v záporném směru. Nový tenzor napětí je \[R(30^\circ)AR(-30^\circ)=
\begin{pmatrix}
2.5 & -4.3\\
-4.3& 7.5
\end{pmatrix}.\] V nových souřadnicích je směr \(x'\) radiální a proto \(\sigma_{RR}=2.5\) a \(\sigma_{LL}=7.5\). Mimodiagonální složka udává komponentu \(\sigma_{RL}=-4.3\). Tento výsledek je stejný, jako výsledek získaný jiným postupem v knize. Použili jsme však jenom základní nástroje lineární algebry.